We have had a lot of sucess over the past year turning the Mothbox from a functional prototype to a mass-manufacturable devices we can make tons of! To celebrate, we are going on a WORLD TOUR! Here’s our current list of stops over the next year!
February 14-24 -Lima, Peru Our team will be at the ICTC helping lead a workshop and discussion about automated insect monitors! Giving a closing plenary about the journey of the Mothbox.
March 2-13 – Barcelona I’ll teach a bubble and interaction design class with Monica Rikic, and then we will spend the weekend at a field site exploring nature with technology!
April 20-22 Open Source Lab Automation – Seattle, WA Workshop about open tools for science!
May – Open Hardware Summit – Berlin If our talk or workshop gets accepted, we will hopefully set up a 3 – Day industrial moth-rave in an abandoned tower (or, maybe something like that 😉 )
May – Mothbox Workshop -Aarhus Invited workshop at the home of automated insect monitoring
June – Bionic Blitz – Marburg Germany Testing Mothbox with lots of other automated monitoring teams!
July 17-19 – Mothapalooza! Ohio I’ll be doing a keynote talk at the moth-iest event!
July 20-26 – Moth Week American Museum – NYC It’s gonna be awesome!
July 28-30 Fab26 Boston (Maybe) Putting in an application 🙂
August 15-19 – Tucson, Arizona Invertebrates in Education and Conservation Conference! I got offered a super wonderful opportunity to give the keynote talk for the IECC conference https://titag.org/iecc-conference/ that will take place in August in Arizona. I have been hearing super cool things about this conference, so stayed tuned for info about how you can join us!
November 7-9 – Entomological Society Meeting – Ohio Going back to the big entomology meeting
December – Australia Mothboxing?
YEAR OF THE MOTH – Art Challenge
If you want to play along, create some kind of artwork (poem, drawing, game, etc…) about that species each week! Share your art on whatever platform with #YearOfTheMoth !
(There’re no prizes or whatever, just honor from Moths)
It starts first week of February with the WHITE WITCH!
The wonderful folks at Wildlabs and ARM once again selected our Mothbox project for their top prize! You can read about our project and the other winners here.
This year’s funding will be put towards a mass manufacturable Mothbox that will be easier to distribute to researchers around the world!
We have already been working hard, and even travelled to Shenzhen, China to learn how to design electronics for mass-production!
I was invited to join the “Thinking with Moss” colloquium about moss held at NYU. After our day of gathering together and discussing the role of moss in the world, we were asked to freely contemplate the discussions and produce something.
It is wonderful to be given such an opportunity.
One thing I was most excited about at the colloquium is that I got to talk about my favorite moss (it grows on big leaves and which gives a delightful smell when you brush against it in the forest) and someone knew what I was talking about! They told me is wasn’t a moss but a kind of liverwort likely a type of Leptolejeunea [https://en.wikipedia.org/wiki/Leptolejeunea] or something in the larger Lejeuneaceae family.
It’s one of my favorite smells in the forest. The intoxicating, licorice-like aroma has captivated me for years and led me to think more deeply about ways I want to be engage with this plant. It led me to the formation of two different projects:
Moss Breath
The Jungle Smallification Device
Moss Breath
“Moss Breath” was the first project I started working on following the “Thinking with Moss”Colloquium. I thought about how much I enjoy the action of breathing in the tiny moss chemicals in the forest, and ways that, perhaps, my breathe could interact with these mosses as well.
This inspired this writing:
“I like to think that plants play an active role in our lives. That they excrete chemical to change our behavior. I like to think about them parasitizing us, in a friendly way, to help themselves grow. Rewarding us with smells and chemicals that make us feel bonded to the forest.
There is a moss (likely actually a liverwort) in the rainforest that grows on the surfaces of big flat leaves. It already steals the sunshine from the other plants around, but when you brush against it, it releases an intoxicating aroma that gives me and other humans pause. Taking a deep breath brings a calmness, and I feel a bond with the rest of the plants around me. Maybe it is wishful thinking, or an escapist fantasy of somehow getting to leave the human world and getting to glimpse into the plant world, but i always imagine these delightful chemicals entering my body and allowing these photosynthetic friends to take over.
For each breath I take of the forest, i grew a desire to breathe back into it.”
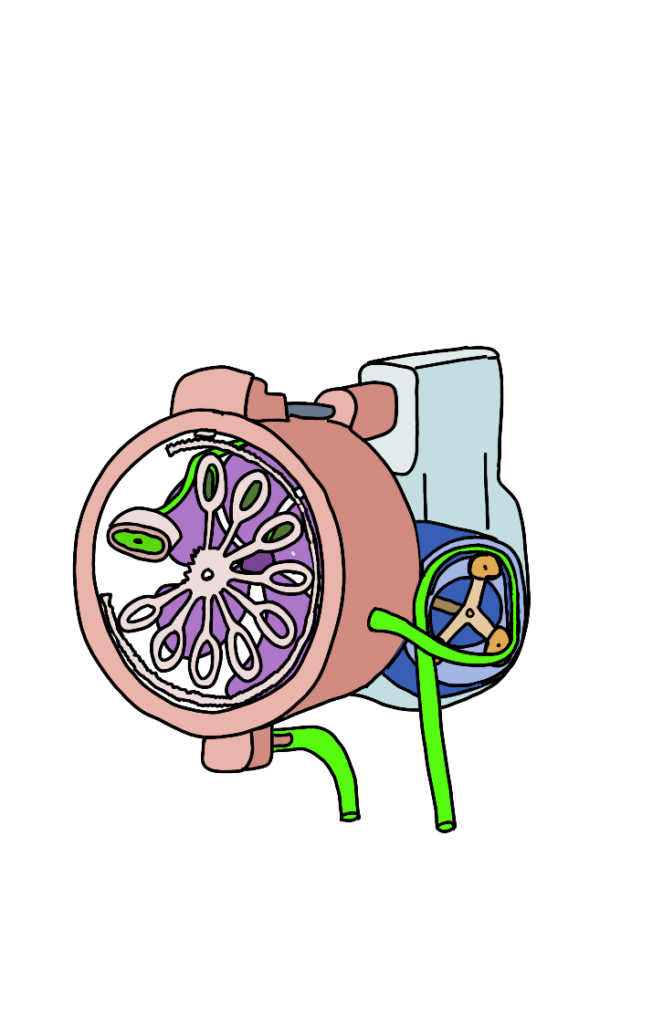
I started working on prototypes that could let me complete this interactive cycle between me and the moss. I have been studying bubbles (and even crafted a whole “Bubblepunk” zine about bubble hacking: https://www.dinalab.net/2023/04/10/bubblepunk/). In my research, I found a group of scientists who have been using bubble machines to artificially pollinate flowers. They mix pollen and bubble fluid and fly drones with bubble machines over the crops to disperse the pollen onto the waiting plants’ pistils.
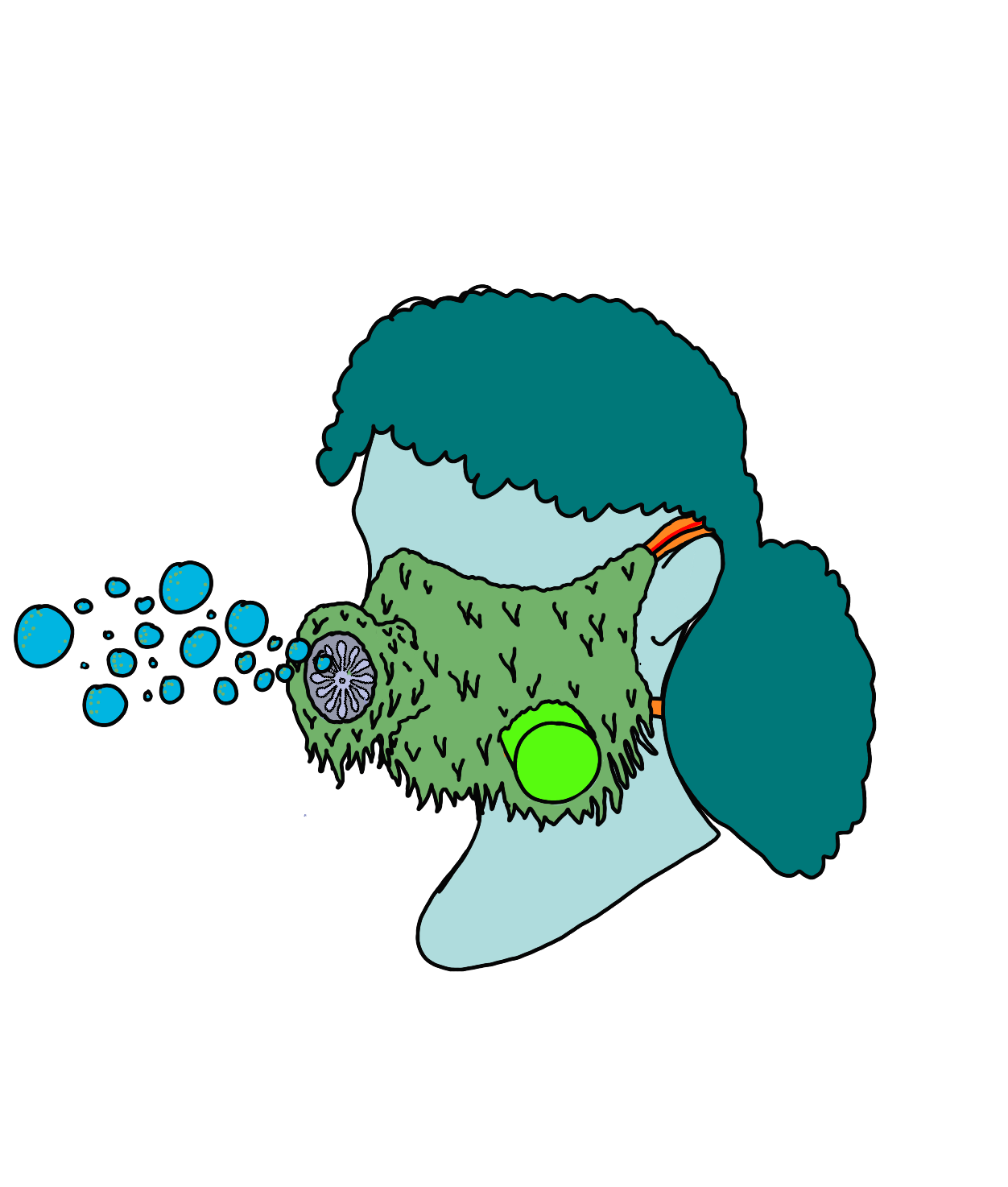
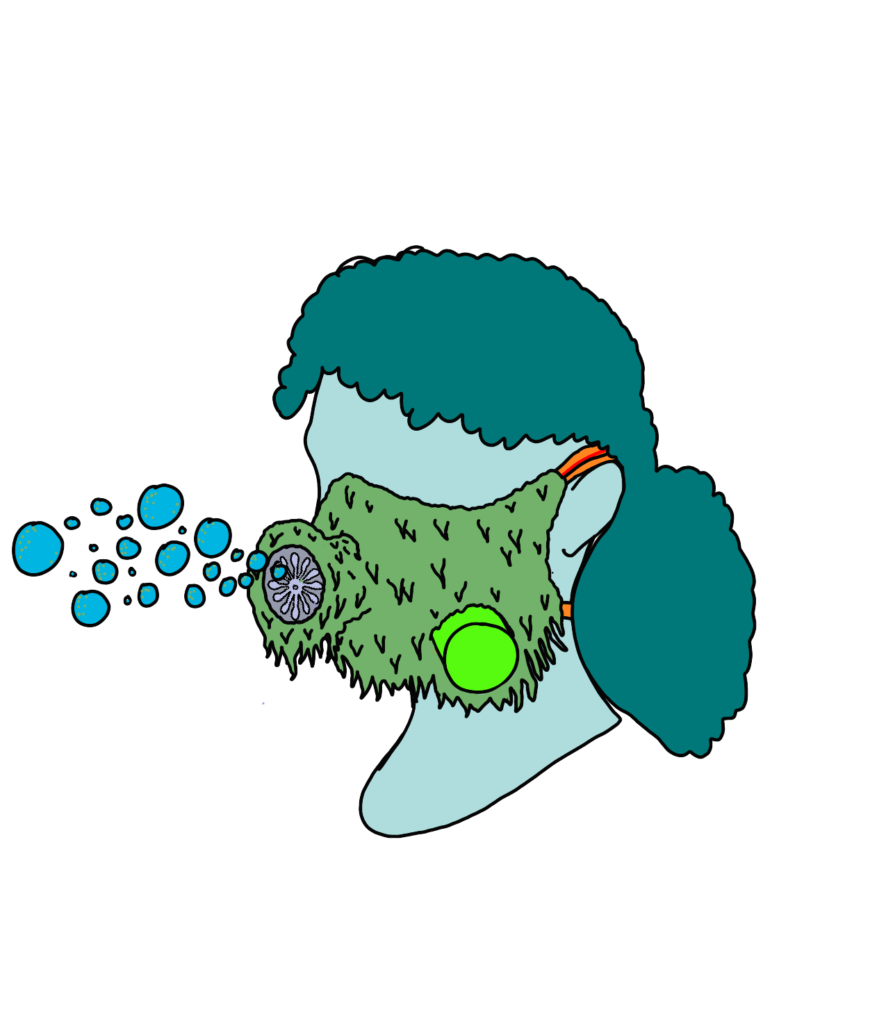
My thought was to use this technique to propagate my favorite moss (or liverwort). I can collect the moss and blend with bubble fluid. I then load this mossy mix into a custom, face-mounted bubble machine. It has an arduino which monitors my breathing and creates mossy bubbles each time I breathe out.
The bubbles land on the surfaces I pass, depositing the moss particles as the bubble pop. The moss spreads with each breath I take.
My goal with this project was to feel infected with the moss. I want to be contagious with green life that I spread about via my own bodily processes.
I have build the initial prototypes for the breathe monitor and the bubble actuator, but want more time to make a beautiful design and craft a video of this concept.
testing the face bubbler
Jungle Smallification Device
Working on the “Moss Breath” project inspired a spin-off project, the “Jungle Smallification Device.” It is a piece of guerilla artwork situated in the rain forest. It grew from the sentiment I had with the Moss Breath project.
Ego-Dissolving Selfie-Station
I wanted something that would make people feel less in control and, in fact, overpowered by the immense green world surrounding them. At the same time, I thought it would be funny to contrast this message with the inherent narcissism of a mirror. So the idea would be to set up a sort of “ego-dissolving selfie-station” along a rainforest trail.
I found a large fisheye-mirror (the kind normally used along roads with blind corners to help cars navigate). The point of this mirror is that it shrinks and situates you inside a much larger field of view.
I fixed a old broken vinyl cutter machine to cut out text which would curve along the periphery of the mirror. The text says:
“ERES UNA PEQUEÑA PARTE DE UN MUNDO INMENSO” (“YOU ARE A SMALL PART OF AN IMMENSE WORLD” )
I then salvaged some old bits of metal and created a custom holster for this large mirror.
Finally, I got a biologist friend to haul the parts out with me to a nearby patch of jungle. There is a lovely Ceiba (Kapok) tree along a trail i know whose gorgeous roots form a small enclave. This functioned well to frame the big silvery eyeball of this artwork.
We hammered in the metal shaft and cut it to position the mirror at a human visitor level. Finally it was secured it with several metal straps.
The piece stands shimmering apart from the surrounding rain-forest.
It catches your eye as you pass through the forest, draws you near, and then asks you to change your perspective and situate yourself as just a small part of your surroundings.
Mirrors are also interesting from a behavioral point of view (for animals or people), and so i set up a camera trap to see how local creatures interact with this new, strange object. I positioned the camera to not be too noticeable, and also hopefully just catch people’s reactions from the back without seeing their faces.
Results: Installation 1
The results of this first installation came out terrifically!
Unfortunately didn’t catch any animal visitors, but the humans gave great reactions.
Ill post a more detailed description of what happened, but basically after a week of dozens of tourists walking by and taking endless selfies, the nearby hotel sent some guys to literally attack and tear down the art installation (note: this is a public area, not the hotel’s property).
Wildcamera
Wildcamera
Wildcamera
seflCapture
Wildcamera
Wildcamera
sef-night-aaron
Wildcamera
Wildcamera
Wildcamera
seffiCapture
Wildcamera
Wildcamera
Wildcamera
selfi
Wildcamera
Wildcamera
Wildcamera
Wildcamera
Wildcamera
I am really enjoying seeing people’s reaction to this work and the little meditative pause / narcissistic impulse it gives to people passing through this beautiful place. Also really enjoyed seeing the point where this simple, basic kind of piece even drives folks to violently attacking it. I guess the hotel doesn’t want people to think they are a small part of an immense world.
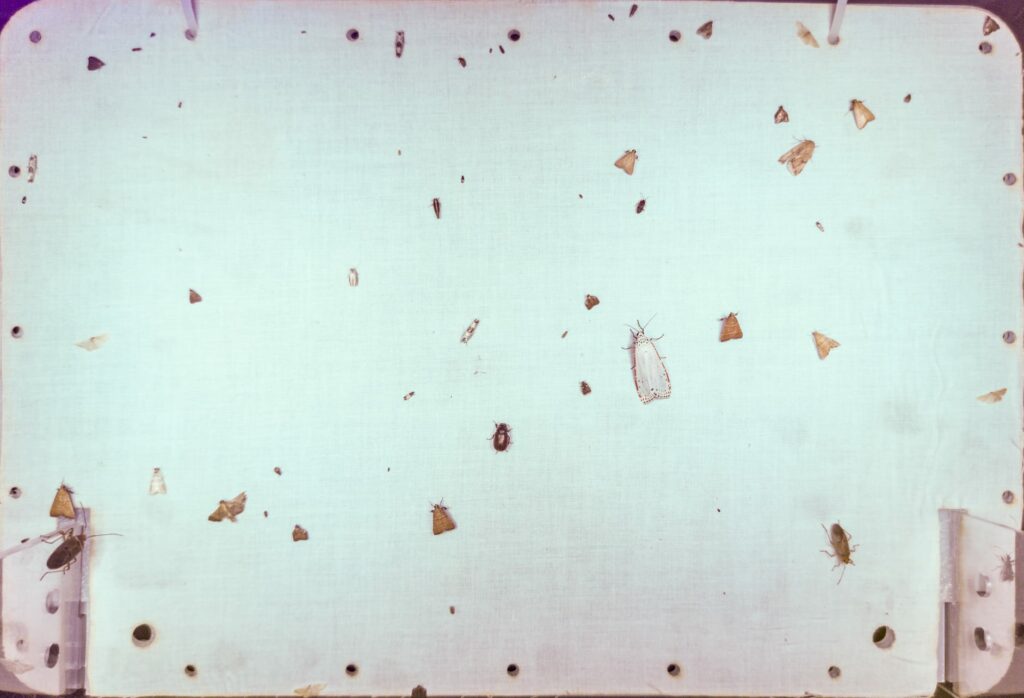
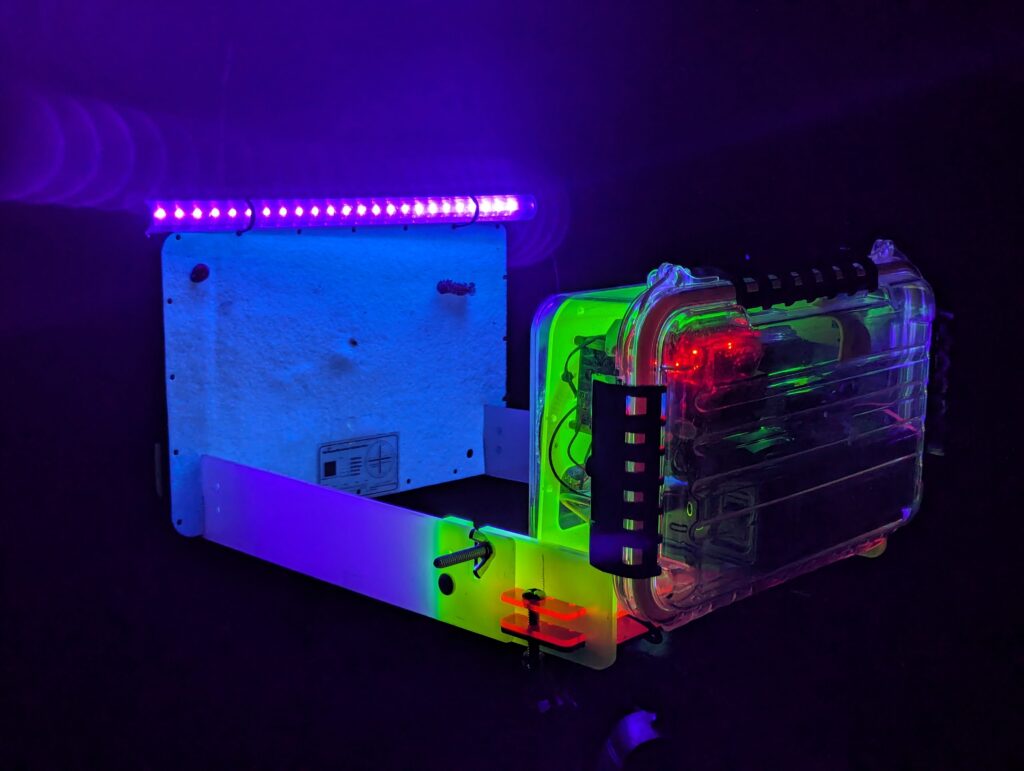
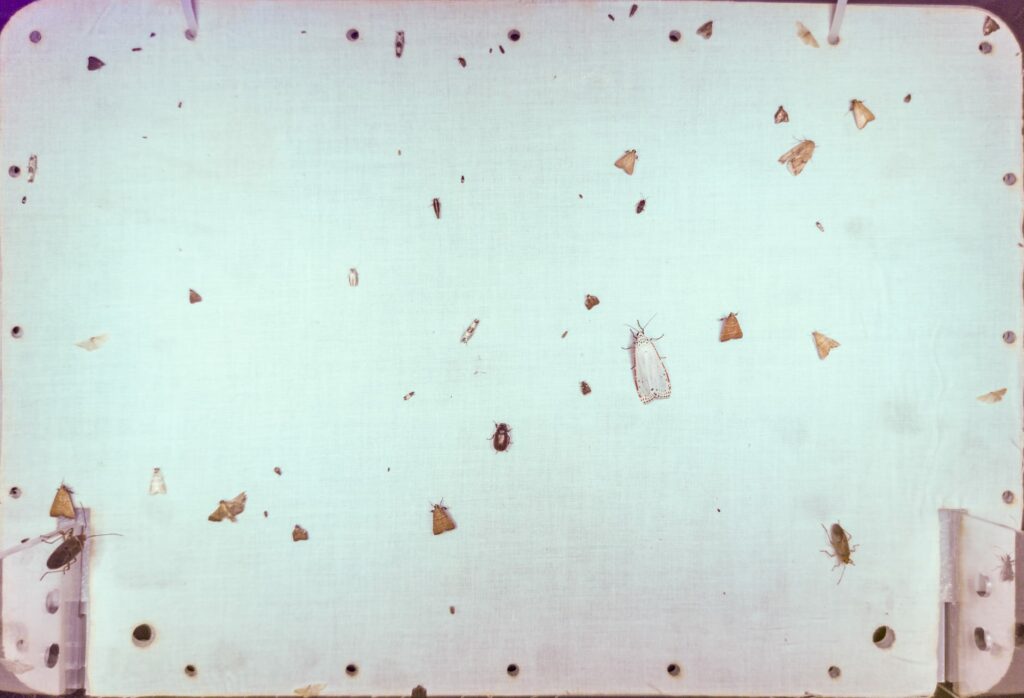
Mothbeam v4.0 in the RainforestHubert’s early collections in Azuero Poliopastea moth
In November 2022, I was enlisted to design an automated, low-cost moth camera with Hubert Szczygiel to help with his bio-diversity assay work with Earthshot labs reforestation projects in Panama.
We then obtained a bit more funding in April 2023 from Michigan State University Professor Phoebe Zarnetske to help further design the project for use in their Rainforest X-prize entry.
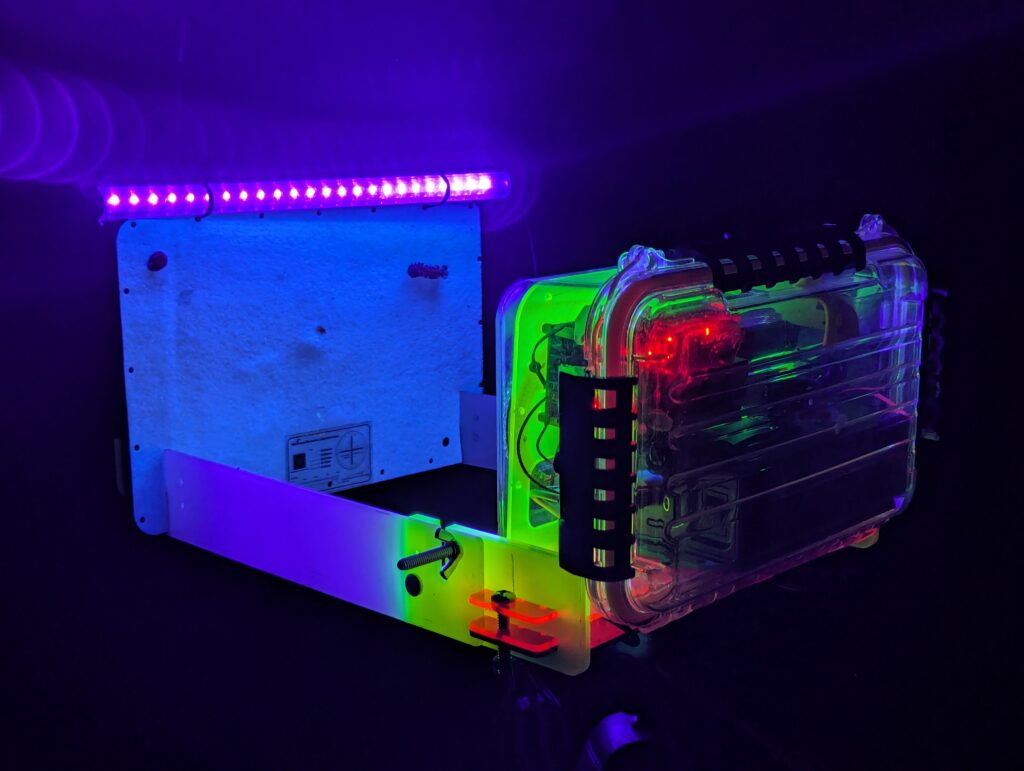
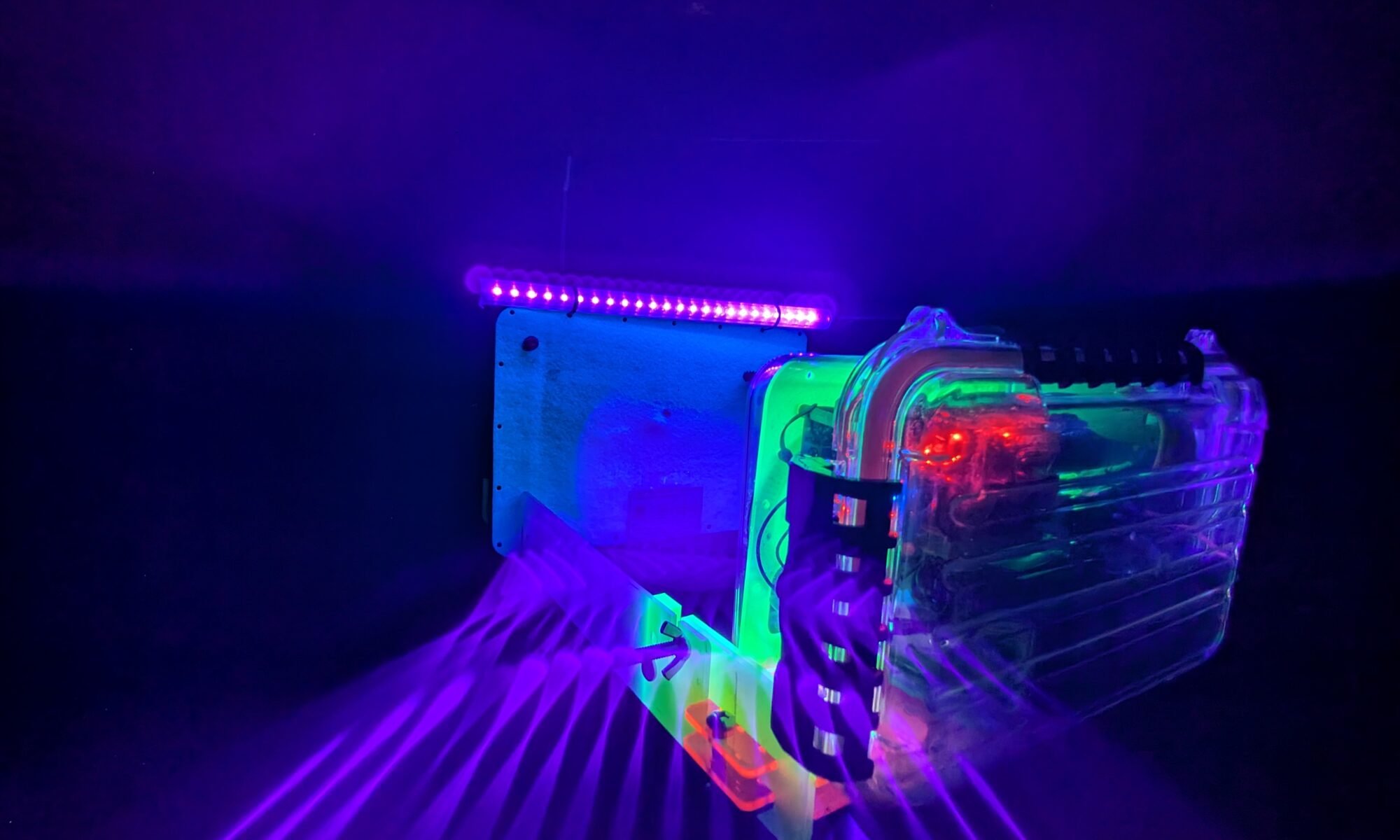
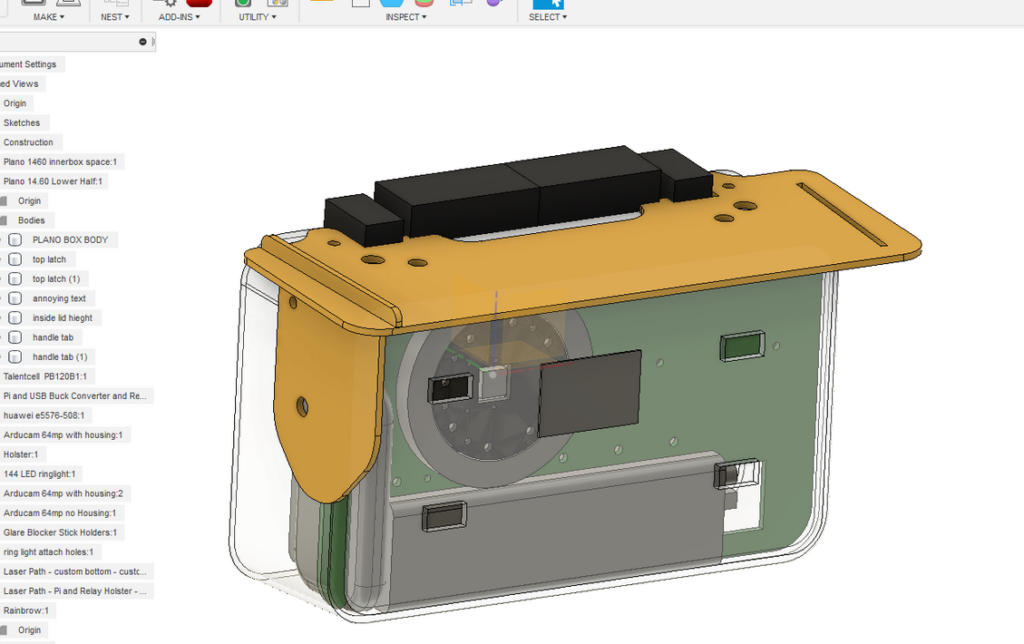
Mothbox v2
I set about sourcing hardware components that would work together and fit into a small, portable, weatherproof, and transparent box. So far tests are looking quite promising!
This is an open science hardware project and all aspects of its design are granted a CC0 License and/or CERN Open Hardware License where applicable.
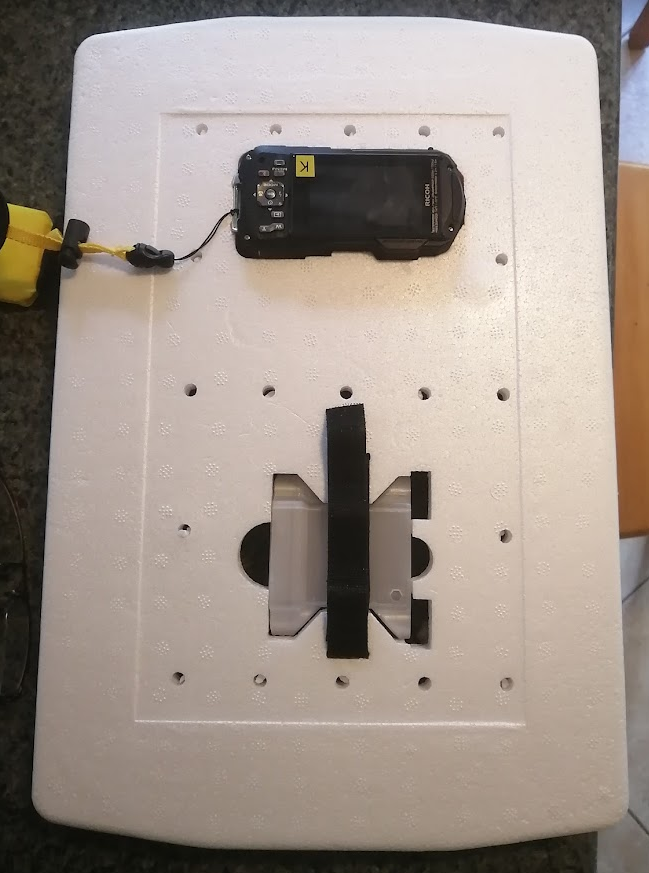
Jenna Kohles studies bats in the chagres river next to gamboa. She needs to study them and the insects that gather around certain parts of the river both acoustically and visually. We helper her design and manufacture floating camera traps that help keep the cameras oriented statically even in shifting waves of the river.
Hacking bubble machines for fun, celebrations, and science!
I will try to collect links to the projects we create about bubble punk (3d models, schematics, how-to articles, zines, etc..) all here! Your one-stop shop for Burbujacking!
Zine
Here’s a link to the full zine hosted on archive.org
Resources can be limited in the jungle, but prototyping needs lots of iterations, and thus creates lots of garbage! To help avoid transporting expensive new materials, and further creating even more garbage in the world, we are trying to make it so that our (solar powered) prototyping workshop uses 100% garbage as materials.
As an beneficial outlet for our experiments with upcycling plastic for instance, we create keychains, earrings, clocks, and other works of art that we sell to raise money for nice organizations.
Our sales have primarily gone to the APPC animal rescue, but we have also made donations to Adopta Bosque, Salva El Grillo (LGBTQ+ activism group),
We even won a prize from Hackaday and we used the money to help get more supplies to Dreamspace Academy in Sri Lanka.
Kitty has been the main artist heading up our upcycled art fundraisers!
Denise is a Post Doc interested in studying different aspects of the ecology of Heliconius. Currently, she is focusing on the role of mushroom bodies in their spatial and visual memory through behavioral experiments.
She came to the GOSH 2022 Global Gathering because she wanted help with a challenge she had studying her butterflies with camera traps. We managed a quick and easy hack that let her work flourish!
The PIR sensors picked up the butterfly movement fine (to my surprise!), but she needed to get up close imagery of them, and the camera traps normally have a set focal length for much further away. We were thinking about hacking the lenses, but during the camera trap hacking session at #gosh2022 (there’s no tag for this yet) with fellow hackers Pen and George Albercook , we came up with an even easier fix!
This week Denise bought some cheap reading glasses (+3.00), we precisely cut them, and we velcroed them on!
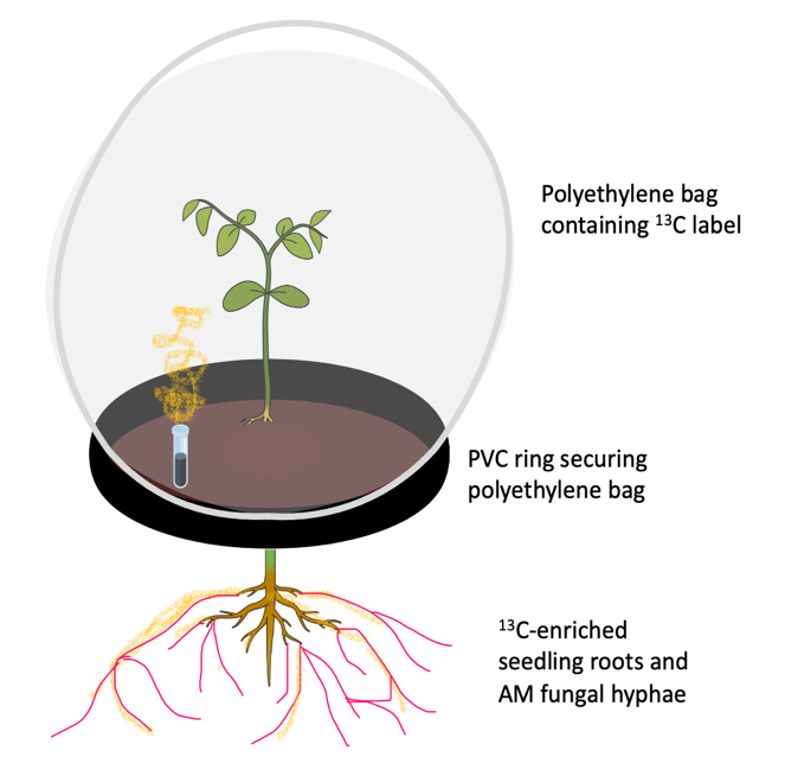
She wants to trakc how much carbon (sugar) the plant gives to their fungal friends (mycorrhizal fungi), and how much it keeps to itself. She needed a portable way to create a controlled atmosphere to inject specific isotopes of carbon into the plants in the field.
We helped obtain materials and brainstorm designs for how to build these devices, and she succeeded fantastically!